“麦耘”室内信息采集装置具备建立室内地图,同步采集室内位置数据、室内空间磁场数据和室内WIFI数据的功能。该装置具有使用方便、操作简单、测量精度高等特点,适用于地图制作以及地磁定位、WIFI定位等室内定位技术应用的基础数据获取。

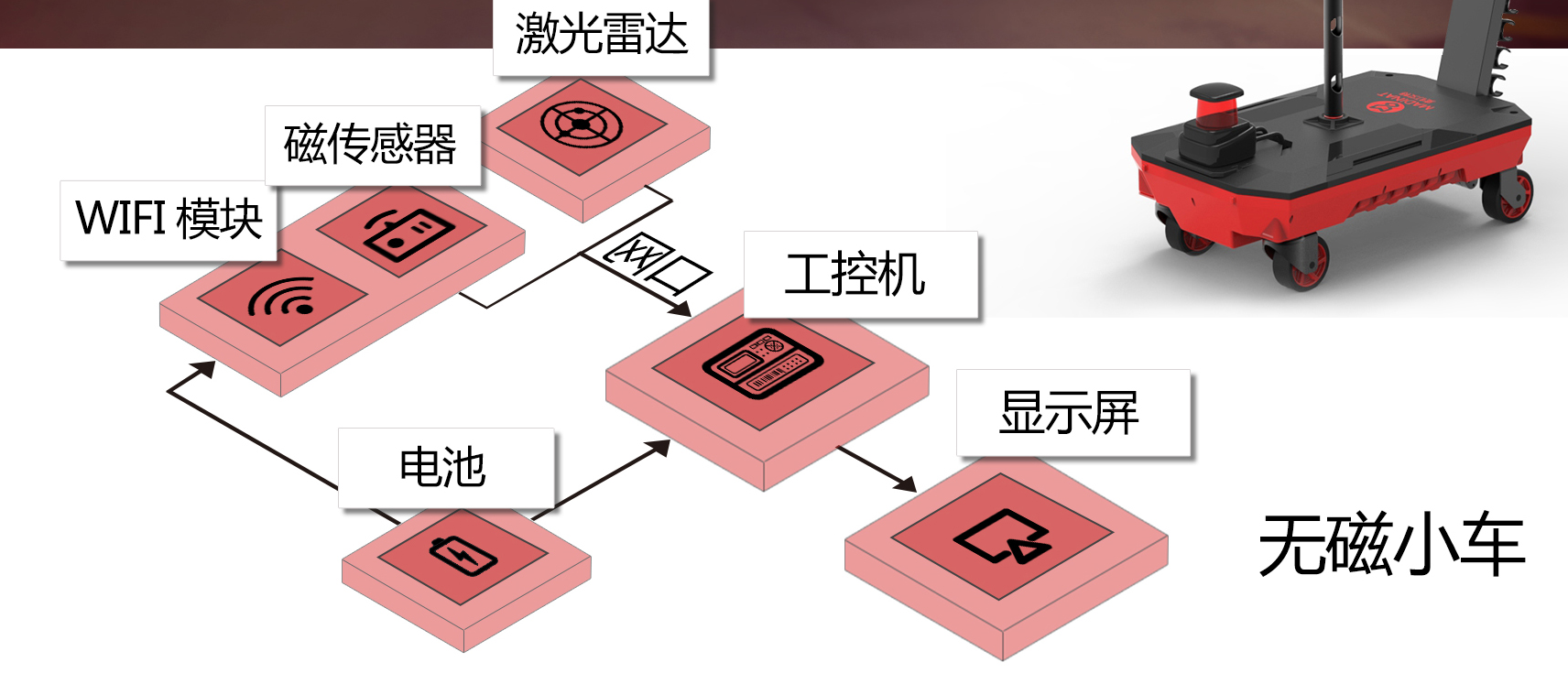
产品由无磁小车、激光雷达、磁传感器、WIFI模块、工控机和显示屏等组成,由人推着小车在测量场地内行走,实现室内数据信息的采集;激光雷达,通过SLAM技术实现室内地图以及位置信息的测量;磁传感器用于测量磁场信息;WIFI模块用于测量AP的SSID、MAC地址和信号强度等信息;磁场数据、激光雷达数据通过网口和工控机连接,工控机接收到数据后完成数据的同步、位置解算、数据存储等功能。

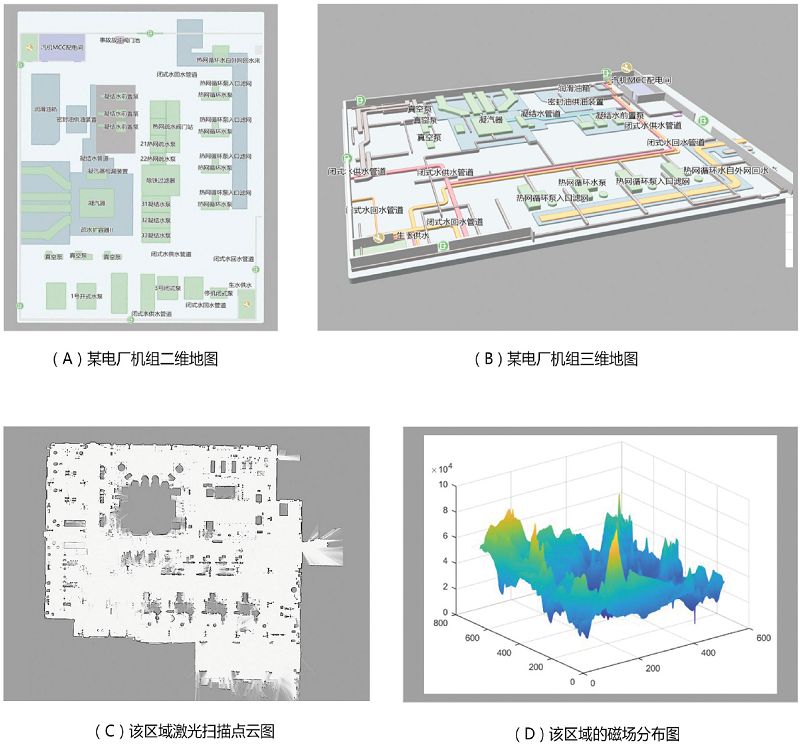
在某电厂汽轮机组 0m处采图并建图,图(A)是汽轮机组二维地图,图(B)是汽轮机组三维地图,图(C)是该区域激光扫描的点云图,图(D)是该区域的磁场分布图。场地面积10000平方米,用时2小时。